Robot Balansujący
Jednym z kluczowych projektów mojego inżynierskiego dorobku był robot balansujący, którego celem było samodzielne utrzymywanie równowagi w oparciu o odpowiednie algorytmy sterowania. Projekt stanowił kompleksowe połączenie wiedzy z zakresu elektroniki, programowania, modelowania 3D oraz druku addytywnego, a jego realizacja wymagała zarówno teoretycznego przygotowania, jak i praktycznych umiejętności inżynierskich.
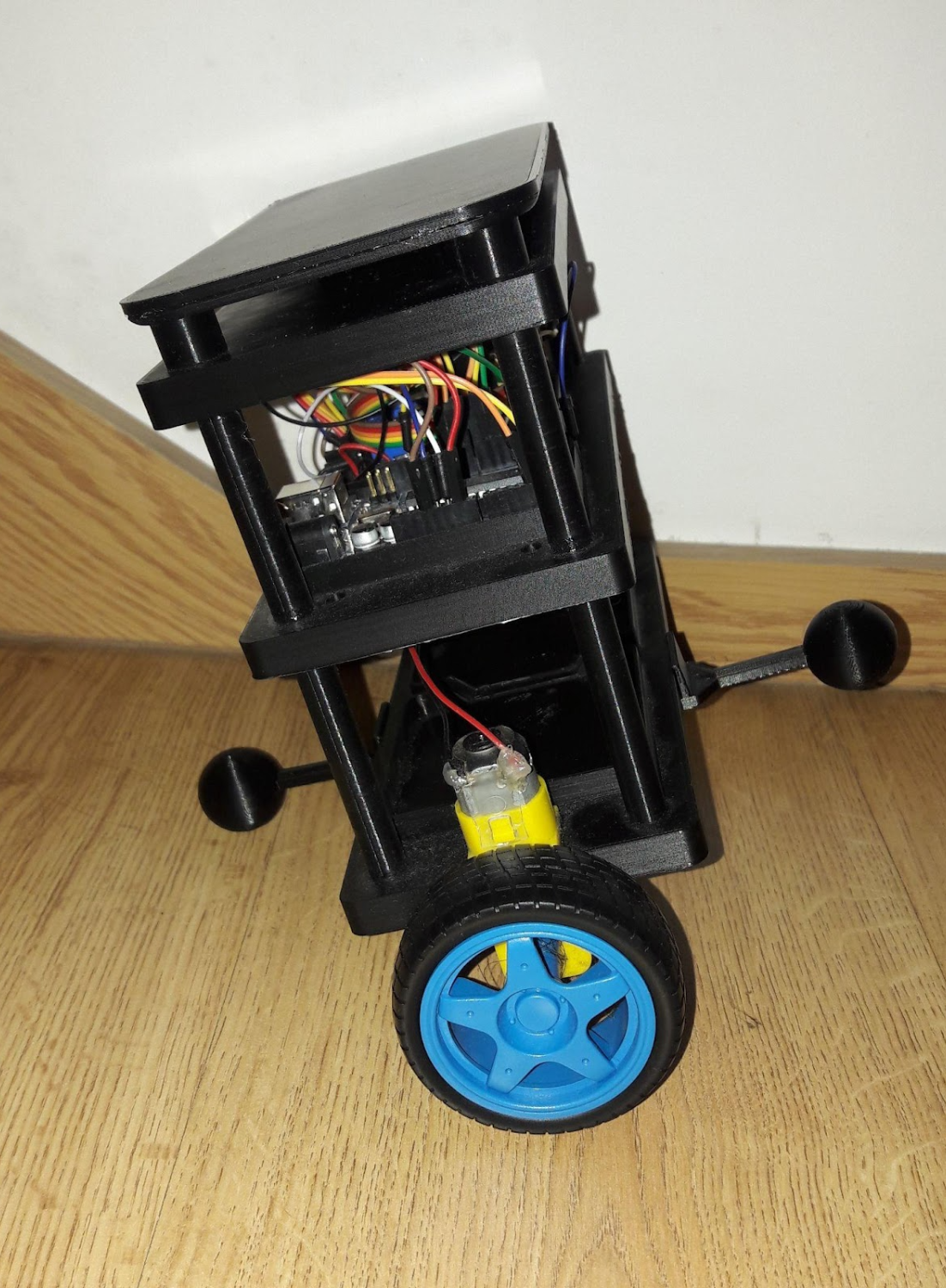
Korpus robota został zaprojektowany w programie do modelowania 3D, co pozwoliło na pełną kontrolę nad jego kształtem, proporcjami oraz rozmieszczeniem elementów elektronicznych. Poszczególne części zostały następnie wydrukowane przy użyciu technologii druku 3D, co umożliwiło stworzenie lekkiej, a zarazem wytrzymałej konstrukcji. Dzięki temu projekt mógł zostać w pełni dostosowany do indywidualnych wymagań, a także wielokrotnie modyfikowany i udoskonalany na etapie prototypowania.

Podstawą konstrukcji robota było Arduino Uno R3, które pełniło rolę głównej jednostki sterującej. Na płytce tej zostało zaimplementowane oprogramowanie odpowiedzialne za odczyt sygnałów z czujników oraz sterowanie silnikami. Kluczowym elementem systemu była implementacja regulatora PID, który umożliwiał dynamiczne korygowanie pozycji robota. Dzięki temu urządzenie potrafiło samodzielnie utrzymywać równowagę w pionie, reagując w czasie rzeczywistym na wszelkie odchylenia od stanu równowagi.
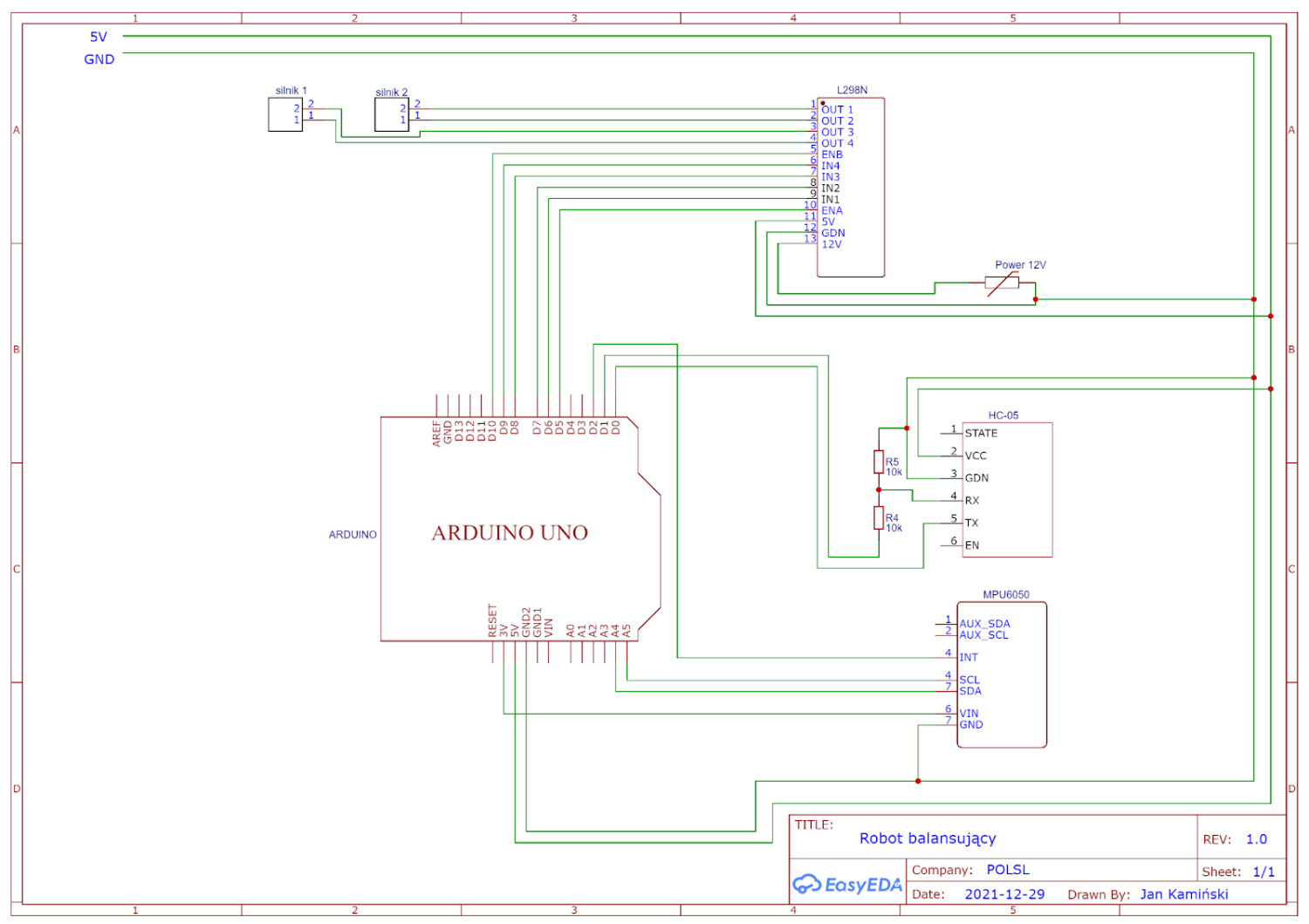
Dodatkowo została opracowana aplikacja mobilna, umożliwiająca sterowanie robotem poprzez komunikację Bluetooth. Robot balansujący był projektem wymagającym połączenia wielu dziedzin inżynierii - od elektroniki i programowania, po projektowanie mechaniczne i druk 3D. Efektem końcowym była w pełni funkcjonalna konstrukcja, zdolna do utrzymywania równowagi oraz sterowania z poziomu aplikacji mobilnej. Projekt ten stanowi solidny przykład praktycznego zastosowania wiedzy inżynierskiej i otwiera drogę do dalszego rozwoju w kierunku autonomicznych systemów mobilnych.